A two-wheel differential drive robot that follows a black (or white) line on the floor using IR reflectance sensors. The sensor array reads contrast between the line and background; a microcontroller computes the line position and adjusts left/right motor PWM to stay centered. Supports simple on/off (bang-bang) control or smooth P/PI/PID control for faster, more stable tracking—ideal for competitions and industrial AGV demonstrations.
Parts Used:
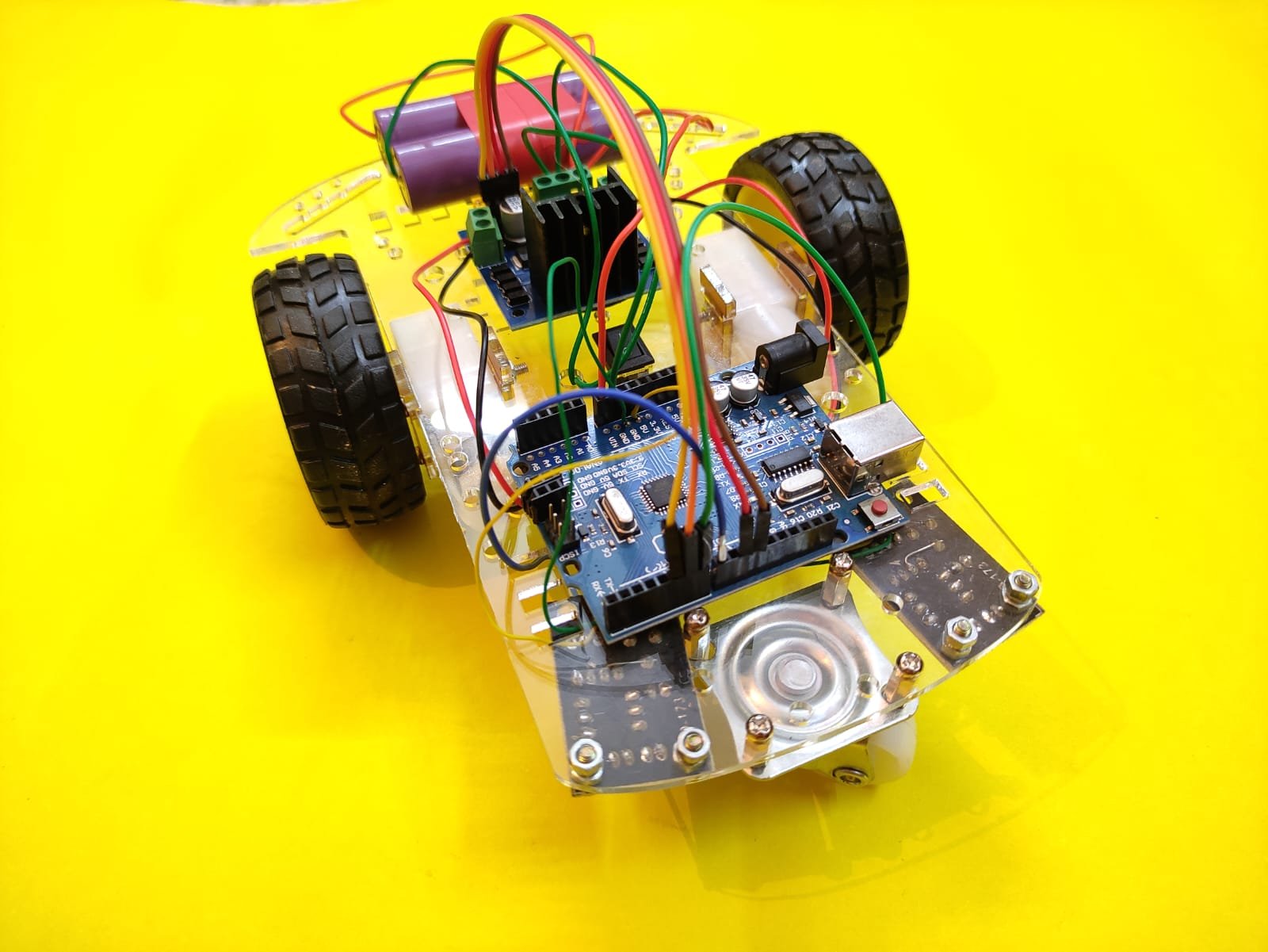
- Microcontroller: Arduino Uno/Nano (or ESP32 for Bluetooth tuning)
- IR Sensor Array: 3–8 channel reflectance sensors (e.g., TCRT5000/QTR array) + calibration buttons
- Motor Driver: L298N / L293D / TB6612FNG (recommended)
- Motors & Chassis: 2× geared DC motors (100–300 RPM), wheels, caster/ball support
- Power: 7.4–12 V battery pack (Li-ion/NiMH) + 5 V regulator for logic
- Switches & Wiring: Main power switch, JST/terminal connectors, breadboard/PCB
- Indicators (Optional): OLED/LED bar to show sensor readout, buzzer for status
- Encoders (Optional): Wheel encoders for speed control and smoother PID
- Extras (Optional): Bluetooth (HC-05) for live PID tuning, line start/finish IR gate


 Got Questions About Your Final Year Project?
Got Questions About Your Final Year Project?